What's Happening With the Robot Arm?
Not too much, sadly. Term started, 2.007 started (introductory post to follow soon), and I've gotten mixed up in other side projects.
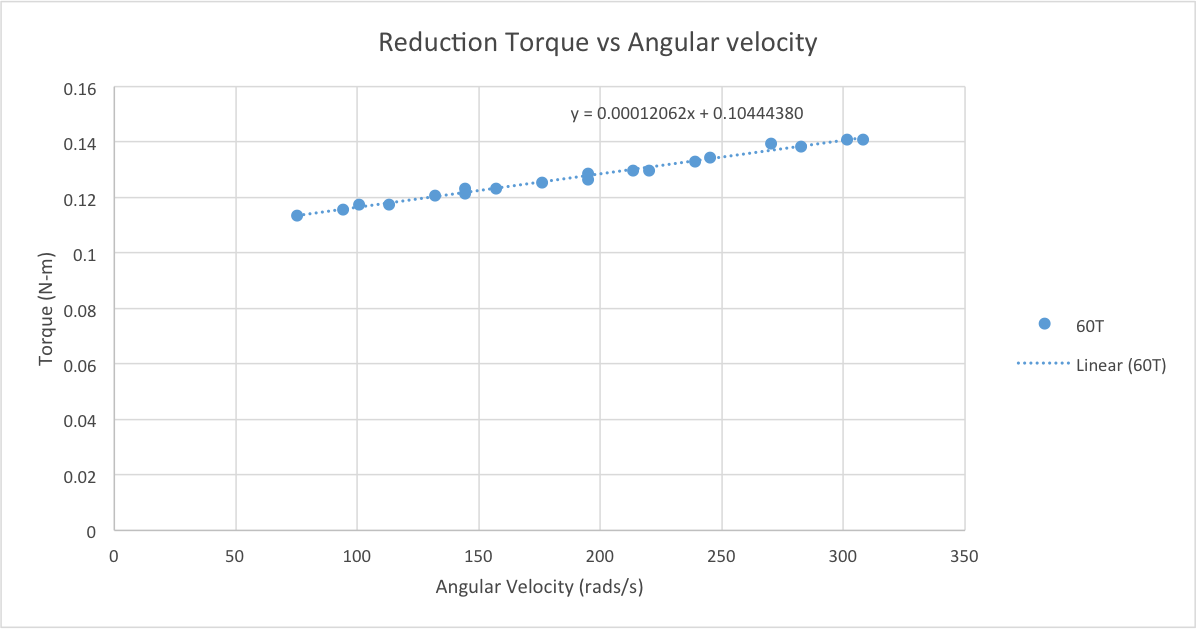
I have made a little progress on characterizing the arm's dynamics for feed-forward control as discussed at the end of the last update. To start out I took some measurements to characterize the friction in the belt reductions. Somehow in the past month my data from the 72 tooth reduction disappeared, but I still have everything from the 60 tooth one, and I remember they were virtually identical:
The process for calculating the friction was pretty simple. I ran the motor off a bench supply at a constant current. I then had the mbed spit back the steady-state angular velocity to my computer over serial. Since I know the torque constant of my motor, I can convert the current draw read off the bench supply into torque produced by the motor. Plotting all this data gives me a nice linear curve representing the friction in the belt reduction as a function of angular velocity.
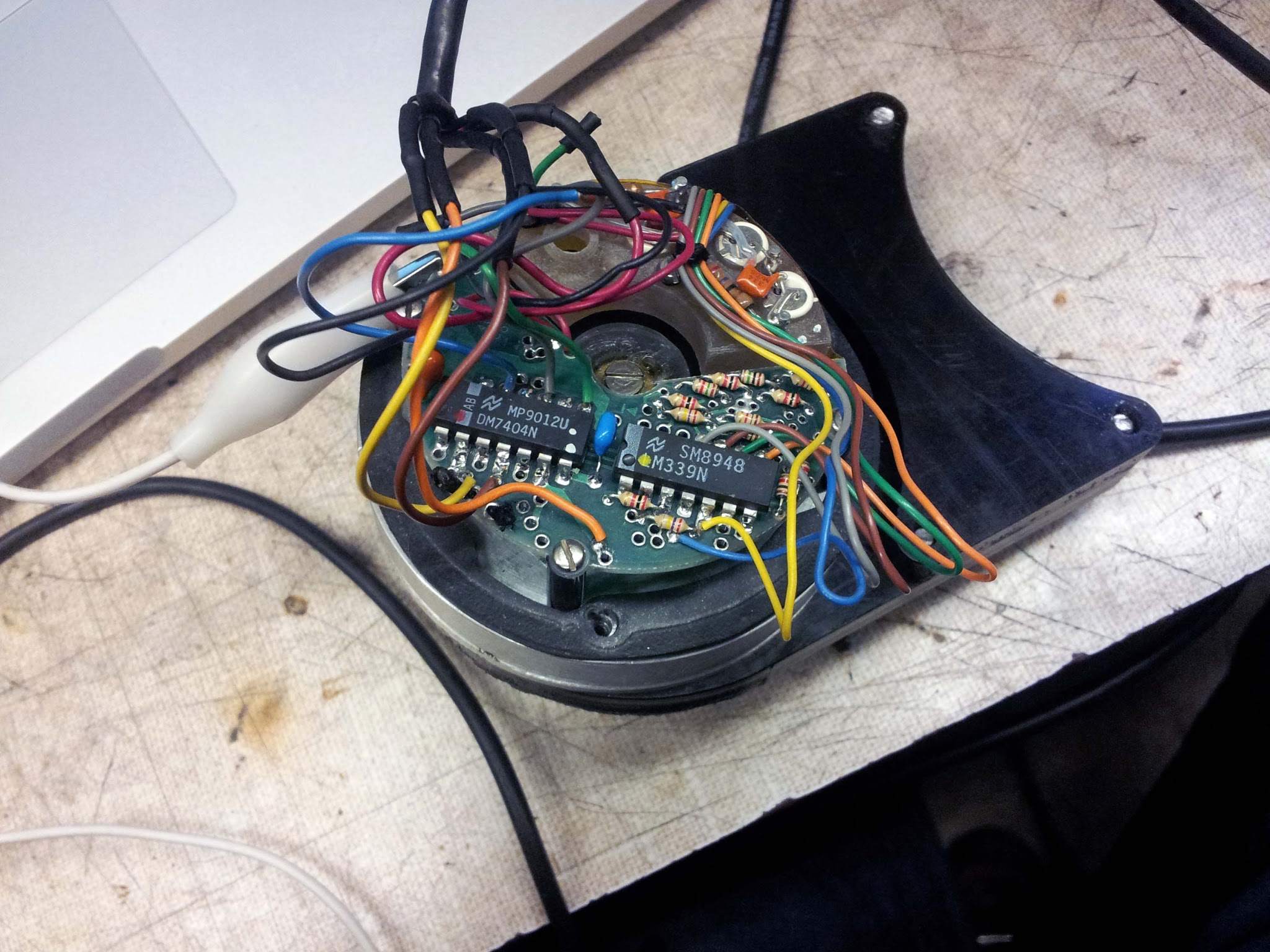
While doing all this testing, all of a sudden the readings from one of my encoders got stuck. I probed the encoder outputs, and found that one channel was stuck high. I cracked open the encoder to investigate further, and found this:
Further probing around the inside told me something was wrong with the 339N comparator (the chip on the right). Fortunately MITERS had some of these same chips floating around. I cut the leads off the original and soldered a new one in its place:
This seems to have fixed things. I can't imagine why the chip would have died in the first place though.
In terms of actual mechanical progress, I machined a new linkage to replace the carbon fiber one. It's basically an aluminum I-beam, with clamping mounts at each end:
I have made a little progress on characterizing the arm's dynamics for feed-forward control as discussed at the end of the last update. To start out I took some measurements to characterize the friction in the belt reductions. Somehow in the past month my data from the 72 tooth reduction disappeared, but I still have everything from the 60 tooth one, and I remember they were virtually identical:
The process for calculating the friction was pretty simple. I ran the motor off a bench supply at a constant current. I then had the mbed spit back the steady-state angular velocity to my computer over serial. Since I know the torque constant of my motor, I can convert the current draw read off the bench supply into torque produced by the motor. Plotting all this data gives me a nice linear curve representing the friction in the belt reduction as a function of angular velocity.
While doing all this testing, all of a sudden the readings from one of my encoders got stuck. I probed the encoder outputs, and found that one channel was stuck high. I cracked open the encoder to investigate further, and found this:
Further probing around the inside told me something was wrong with the 339N comparator (the chip on the right). Fortunately MITERS had some of these same chips floating around. I cut the leads off the original and soldered a new one in its place:

This seems to have fixed things. I can't imagine why the chip would have died in the first place though.
In terms of actual mechanical progress, I machined a new linkage to replace the carbon fiber one. It's basically an aluminum I-beam, with clamping mounts at each end:


Comments
No comments yet.