Planetary Gearboxes
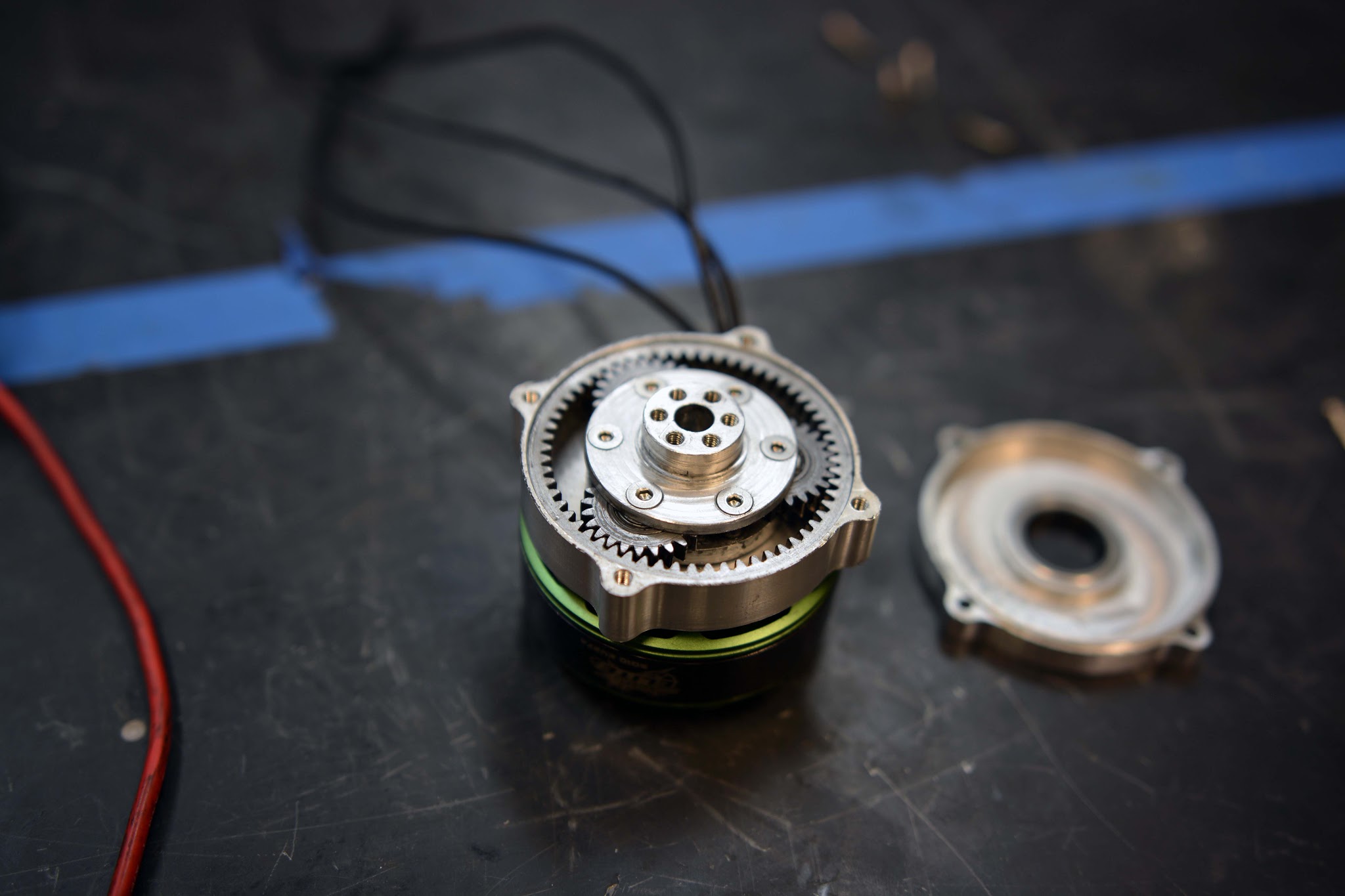
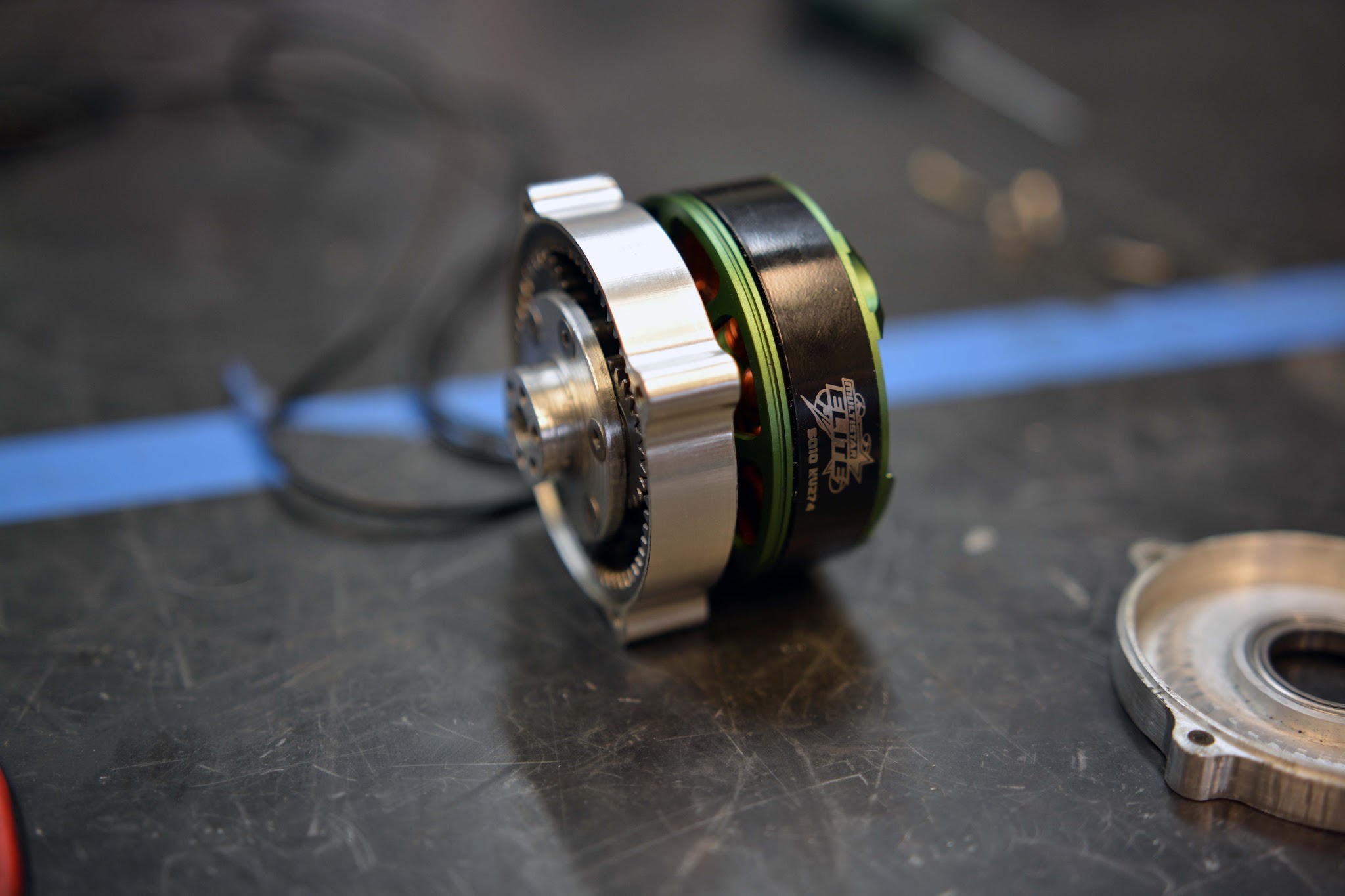
I made a little single-stage 6:1 planetary gearbox for one of the motors.
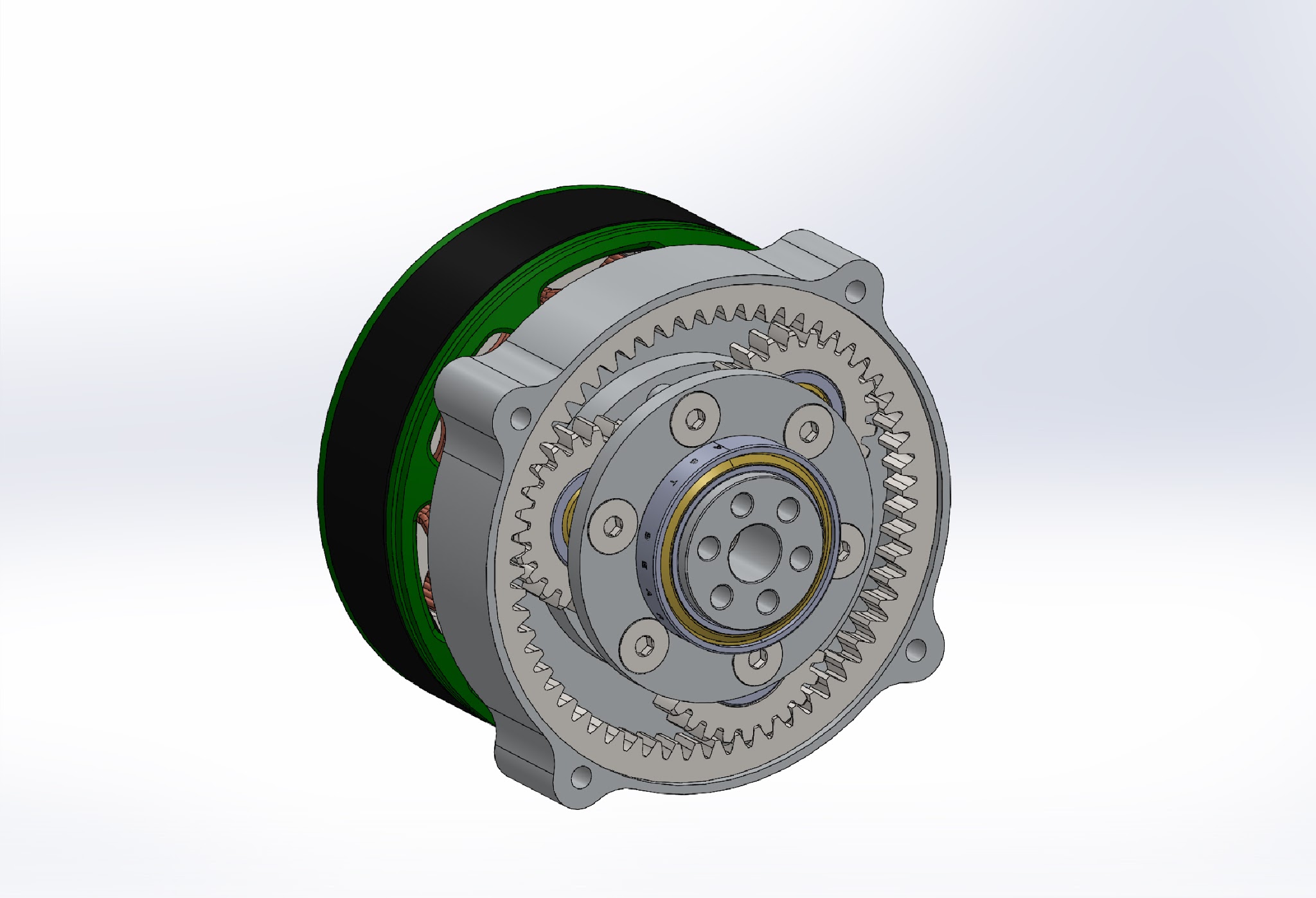
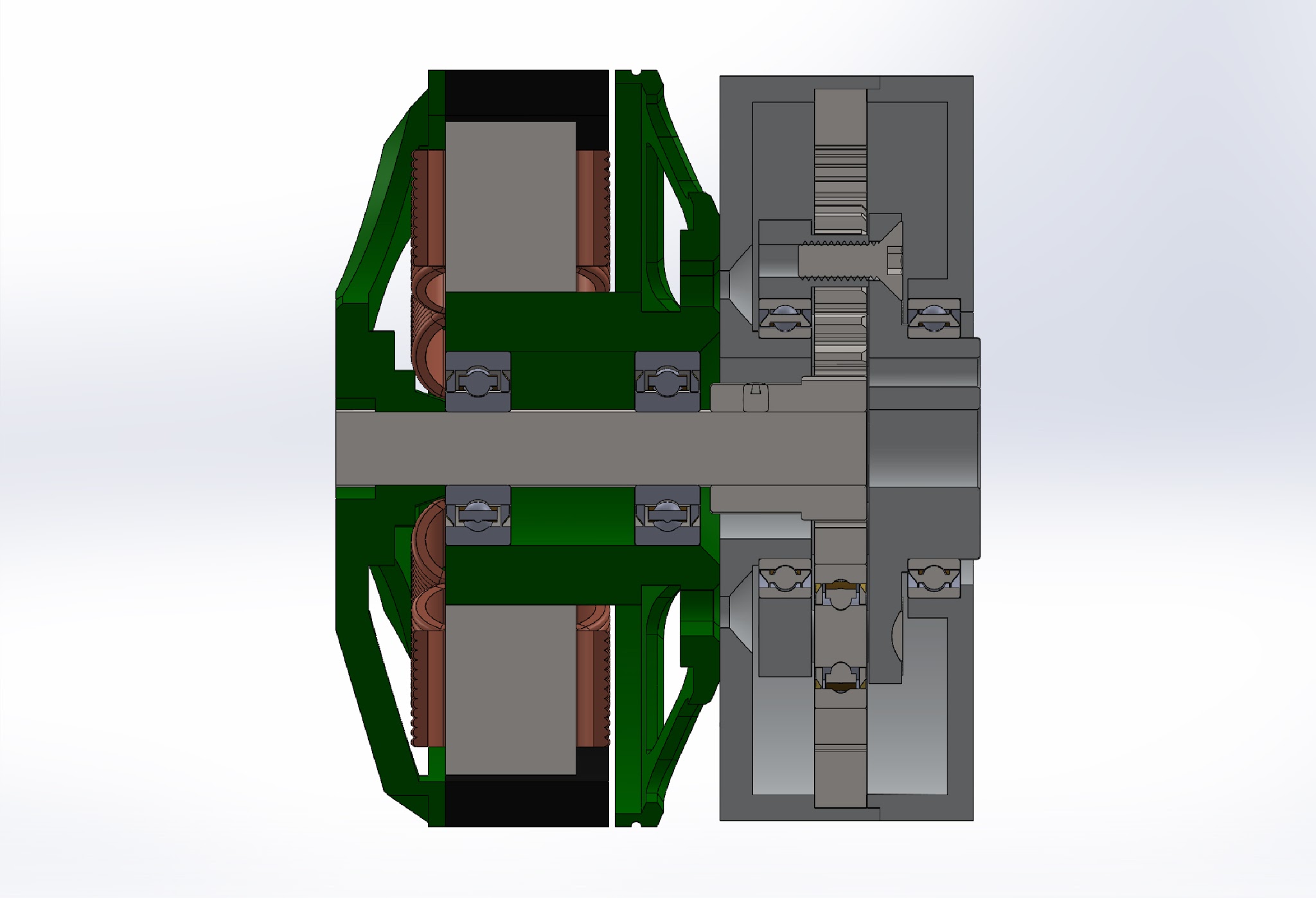
Cross section, so you can see the bearing arrangement. For compactness and maximum bearing spacing, the planet carrier is supported on either side by bearings, rather than cantilevered as they usually are.
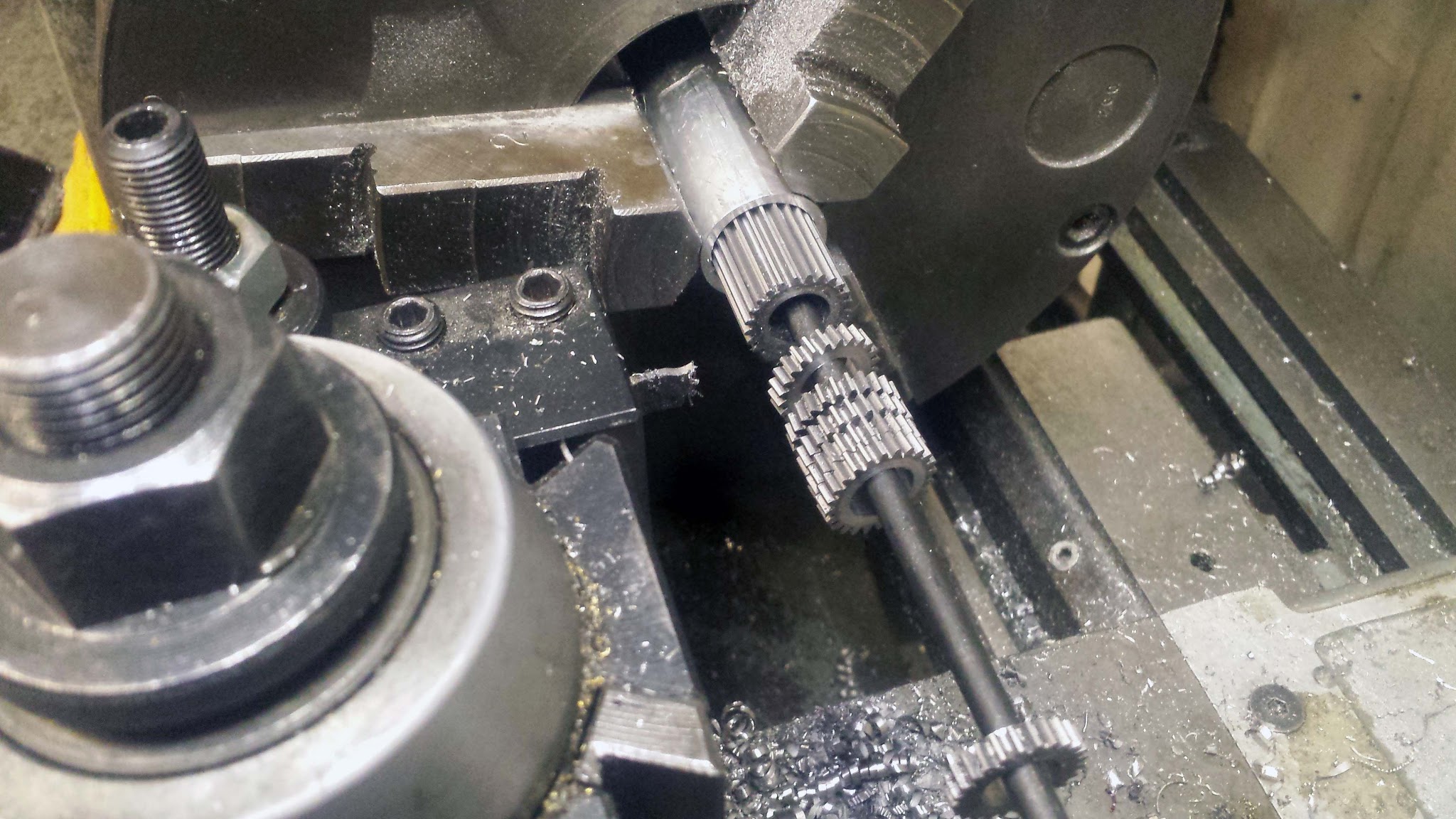
Parting a bunch of 24 tooth planets off some gear rod stock.
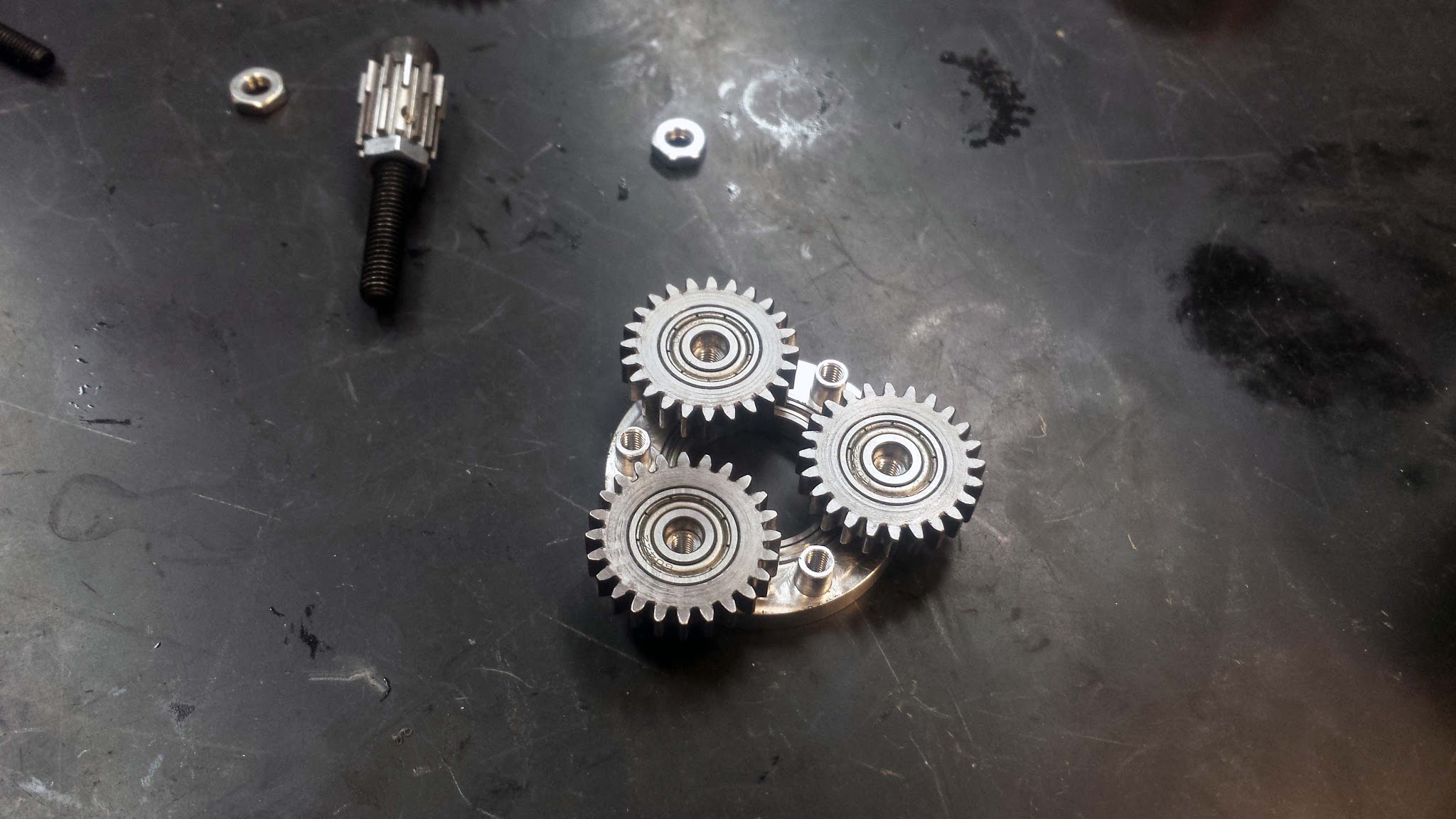
To reduce backlash and make everything generally smoother, the planets have ball bearings pressed into them. The inner race of the bearings are pressed onto the planet carrier. Usually the planets ride on pins with bushings, which will contribute to backlash and friction in the gearbox:.

To machine the planet carrier and housing, I had to calibrate the MITERS CNC mill, which hadn't been fully calibrated after its LinuxCNC upgrade. The ballscrew pitch (which we previously didn't know) was figured out by drilling and reaming a set of holes, pressing in dowel pins, and measuring the spacing between the pins. The number of encoder ticks (thus revolutions of the motor) and this distance were used to calculate the pitch, which we then rounded to the closest reasonable number (the measurement was off by ~.04%). With the pitch correct, I then calibrated the backlash in the X/Y axes. Final result machining a 20mm circle was dead on in one axis, and + 9 microns in the other axis. Not too bad.


1/2 a planet carrier:
Front half of the housing:

Back half of the housing. The ring gear was machined from a chunk of BaneBots P80 ring gear. You can make ~8 of these from a $23 section BaneBots ring gear, while a comparable gear from SD-PSI costs ~$50.

Pinon shrink-fit onto the motor shaft:

Output half of the planet carrier installed:
And...I forgot to take a picture of it fully assembled. Oh well. This is a test gearbox, so I probably won't end up using it in a leg, but we'll see. KHK Gears also sampled me some ring gears, planets and pinions to build up a pair of gearboxes. I'll probably end up using those for a actual leg, because they're finer pitch (.5 Mod) and I expect them to be a bit smoother, since 1: I didn't have to part them off larger stock, and 2: they're make by the same manufacturer and designed to used in planetary gear sets.
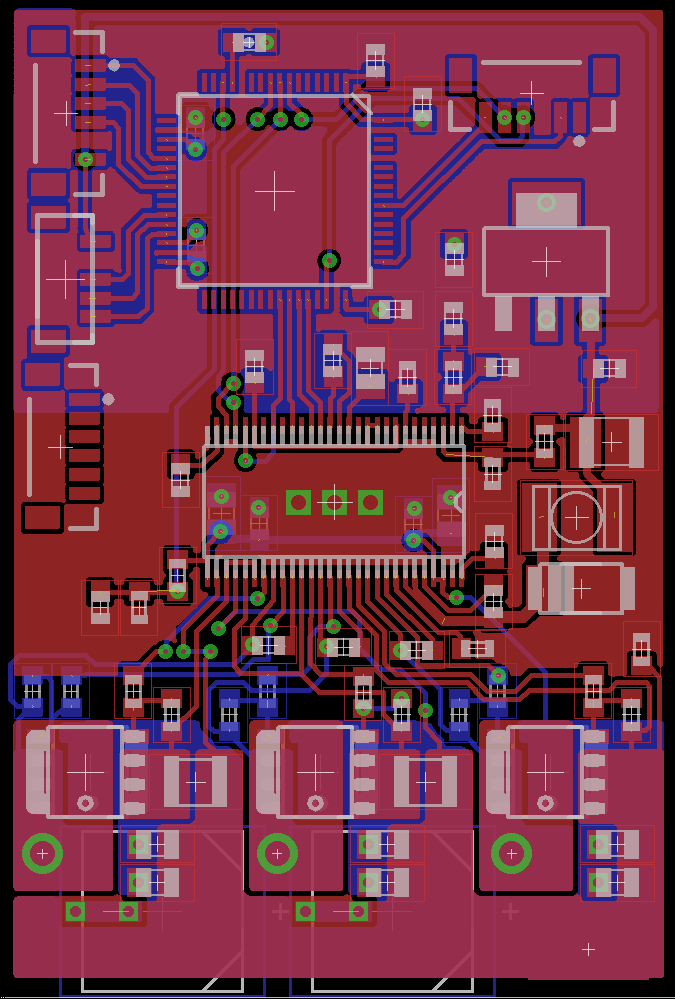
Also, here's a sneak-peak at version 2 of the motor control board. All-in-one this time, not a Nucleo-stack. I still need to finalize position sensor before I finish routing in connectors, but it's really close to being ready to send out. Total size is 35x52mm.
Comments