Small Motor Controllers, Round 2
A few minor differences on this revision:
- Switched to lower-ESR through-hole electrolytic capacitors, from surface mount ones
- Added a MCP 2562 CAN transceiver, to make it more straightforward to build robots with lots of motors on them.
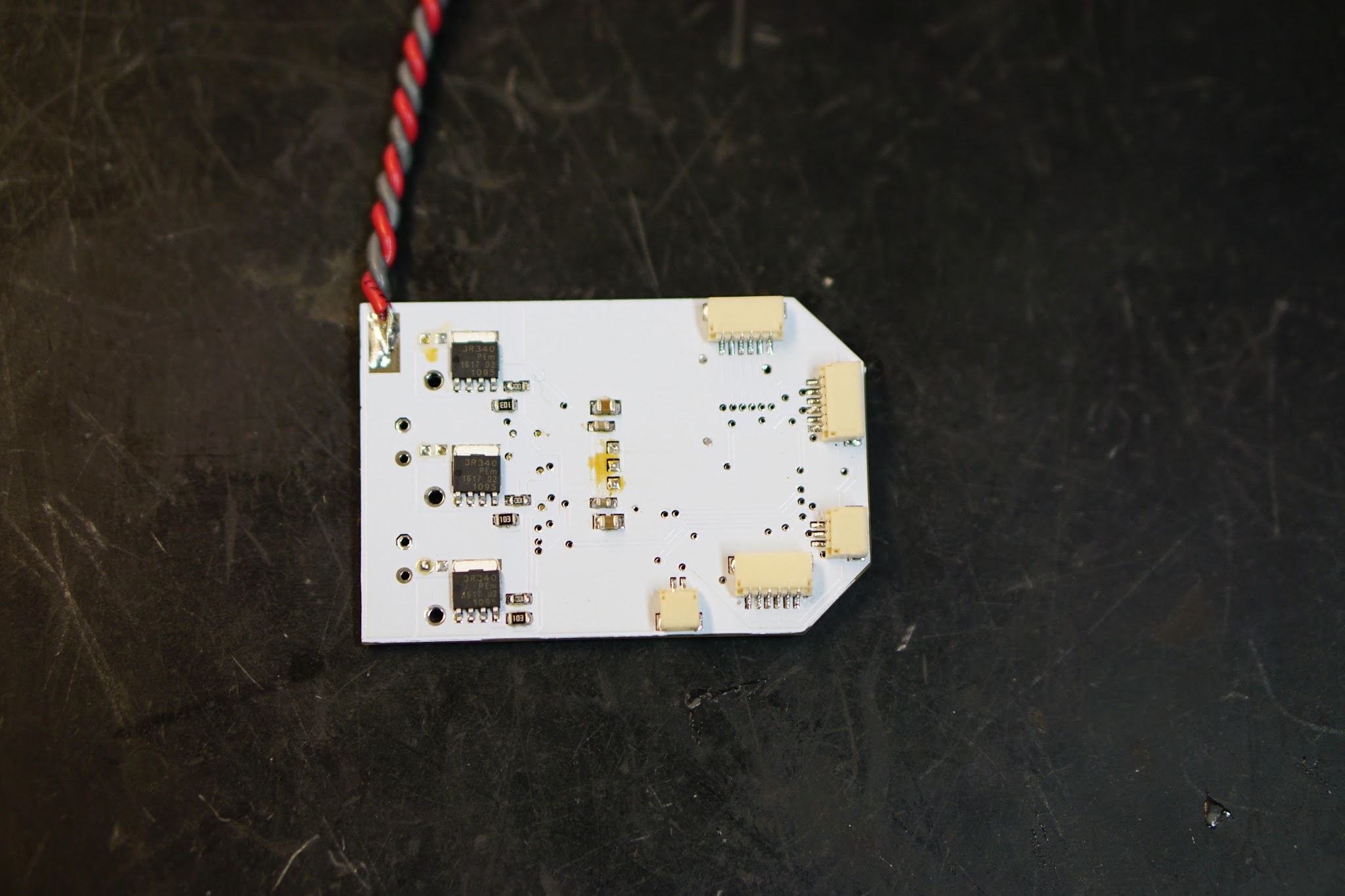
- Moved all the connectors to the edges of the board, and made them right-angle, for neater wiring
- 2 oz copper instead of 1 oz.
- Sweet white solder mask
Stack o' boards from 3pcb:

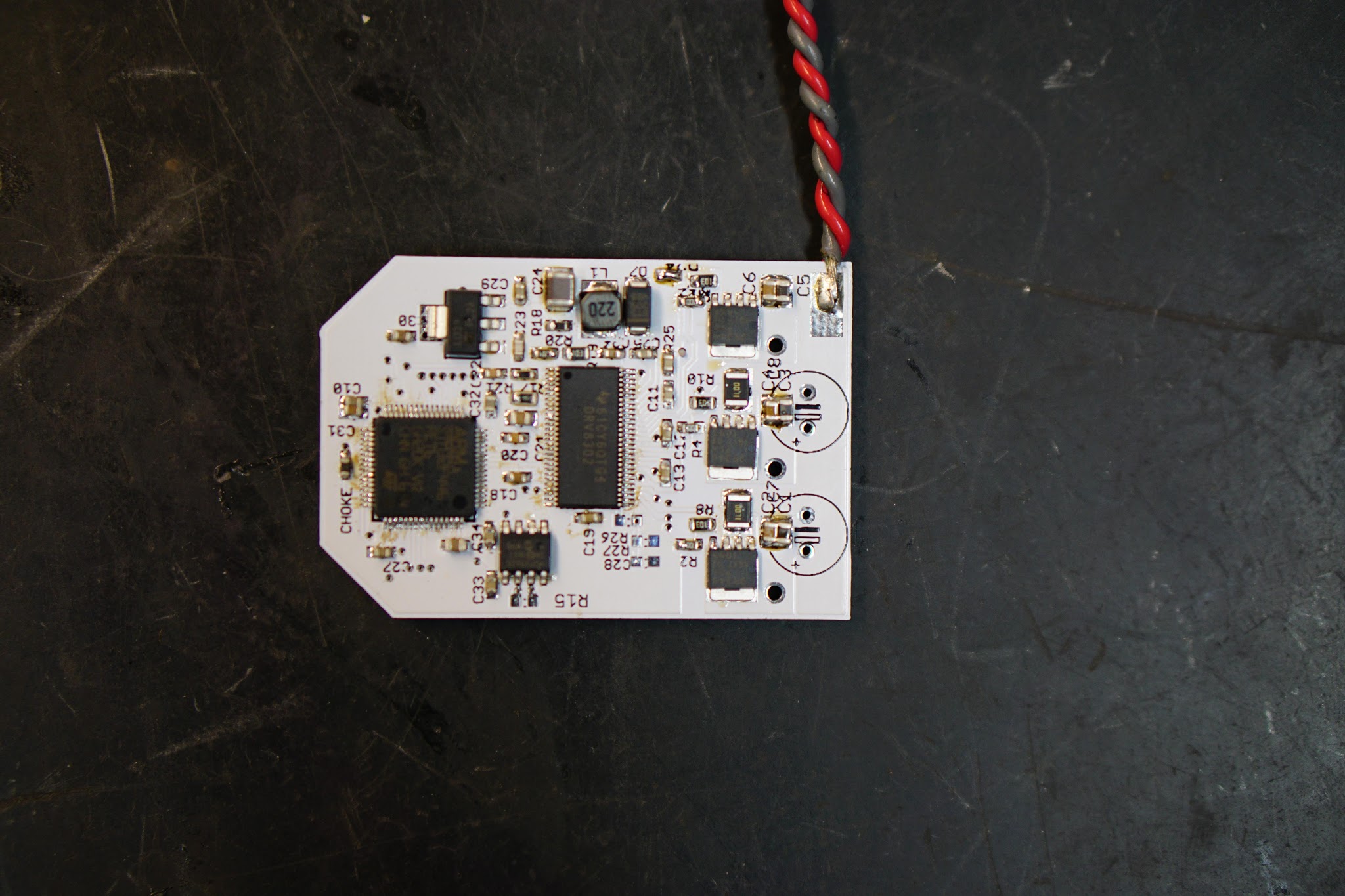
One assembled (minus electrolytics):
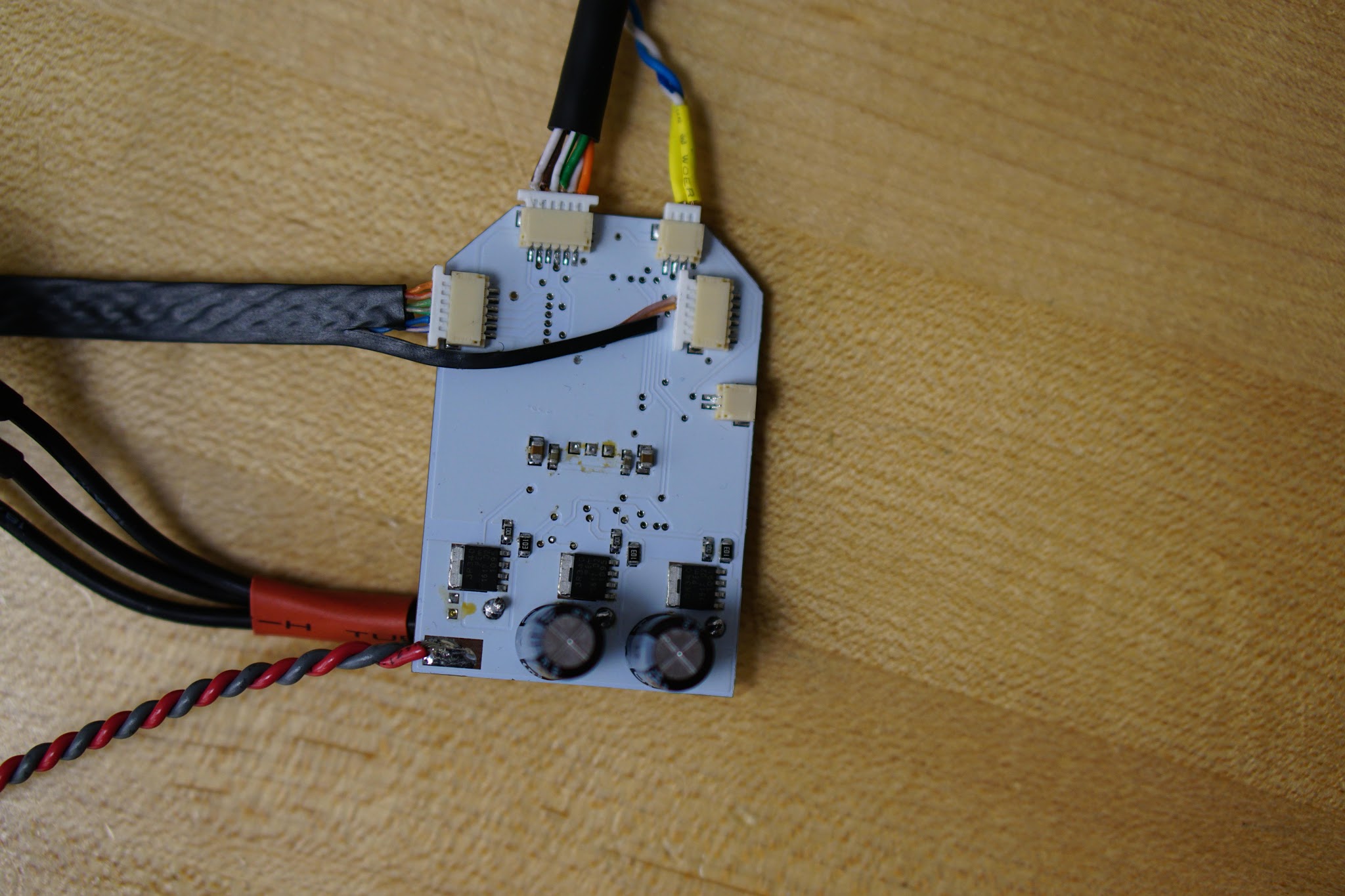
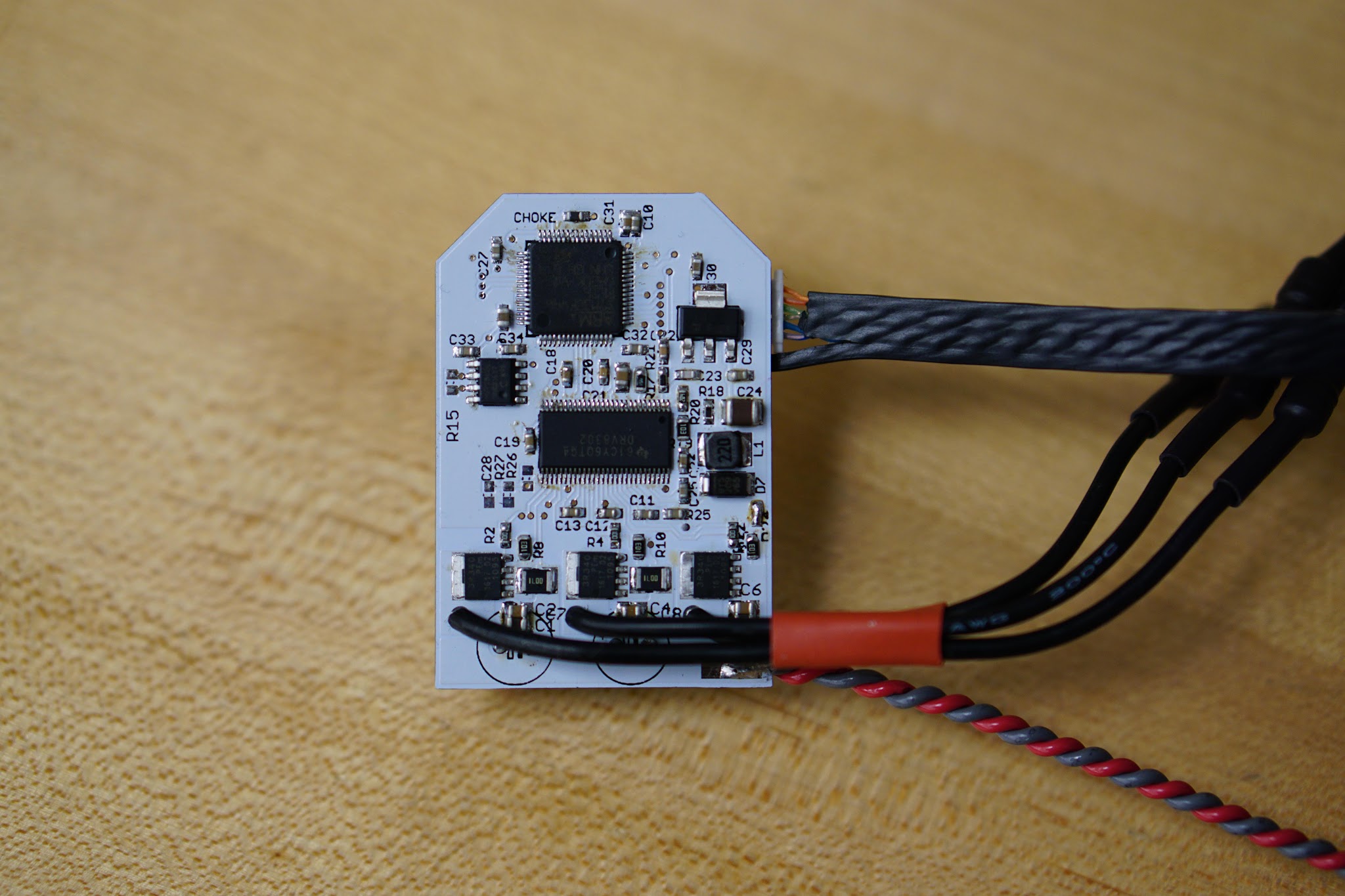
And fully assembled attached, with a motor and absolute + encoder position sensing, programming header, and serial port attached:
Comments