The Mini Cheetah Robot
Back during my second year of undergrad I started scheming about building legged robots out of cheap hobby brushless motors. Two years later as a senior, I finally made a first-pass at building some of the hardware - motor controllers, gearboxes, and a two-degree of freedom leg. Things look promising, so I stayed at MIT to do a masters in Sangbae's lab continuing the project. The Mini Cheetah robot is the result of that work:
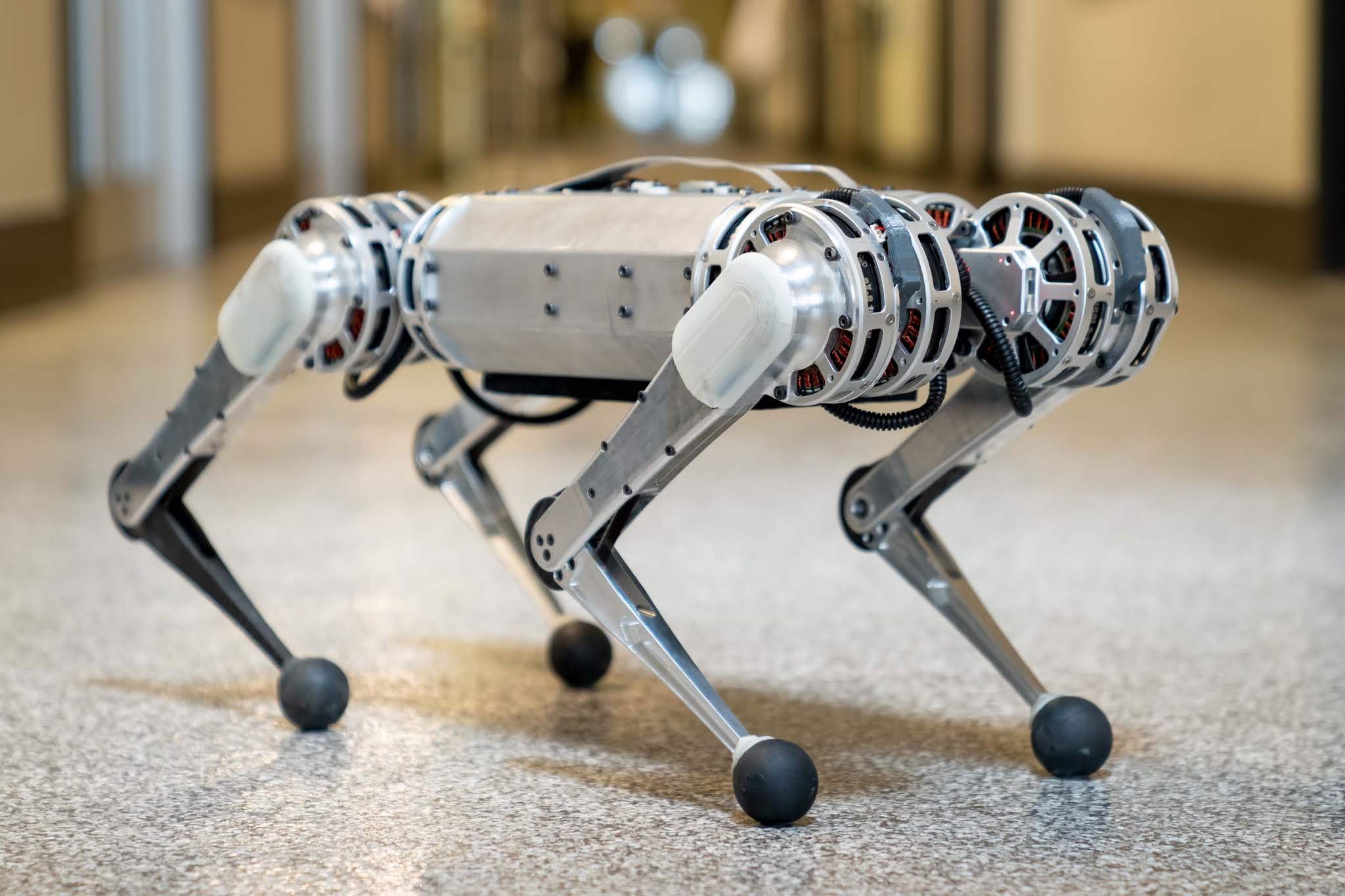 |
| Photo: Bryce Vickmark |
 |
| First quadruped robot to do a backflip! |
The first version of the robot was put together in March 2018. I spent the summer after finishing my Masters helping get the robot fully up and running (literally). When we saw how well everything worked, we decided to build a handful more of the robots, both for our lab and to loan out to other research groups to experiment on. I spent about a year doing some design revisions and building 10 more of the robots.
The robot is probably best documented in my masters thesis, but there are also several blog-posts as well.
Here are several papers (in no particular order) published about the robot or using it. I'll keep updating this list as I hear about more publications using the robot
- Mini cheetah: A platform for pushing the limits of dynamic quadruped control
- Benjamin Katz, Jared Di Carlo, Sangbae Kim
- Highly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control
- Donghyun Kim, Jared Di Carlo, Benjamin Katz, Gerardo Bledt, Sangbae Kim
- Vision aided dynamic exploration of unstructured terrain with a small-scale quadruped robot
- D Kim, D Carballo, J Di Carlo, B Katz, G Bledt, B Lim, S Kim
- Hybrid Systems Differential Dynamic Programming for Whole-Body Motion Planning of Legged Robots
- He Li, Patrick M. Wensing
- Model Hierarchy Predictive Control of Robotic Systems
- He Li, Robert J. Frei, Patrick M. Wensing
- Regularized predictive control framework for robust dynamic legged locomotion
- Bledt, Gerardo.
- Extracting Legged Locomotion Heuristics with Regularized Predictive Control
- Gerardo Bledt; Sangbae Kim
- Variational-Based Optimal Control of Underactuated Balancing for Dynamic Quadrupeds
- M Chignoli, PM Wensing
- Robust Autonomous Navigation of a Small-Scale Quadruped Robot in Real-World Environments.
- Dudzik, Thomas & Chignoli, Matthew & Bledt, Gerardo & Lim, Bryan & Miller, Adam & Kim, Donghyun & Kim, Sangbae.
- Concurrent Training of a Control Policy and a State Estimator for Dynamic and Robust Legged Locomotion
- Gwanghyeon Ji, Juhyeok Mun, Hyeongjun Kim, Jemin Hwangbo
- Learning to Jump from Pixels
- Gabriel B. Margolis, Tao Chen, Kartik Paigwar, Xiang Fu, Donghyun Kim, Sangbae Kim, Pulkit Agrawa
- Agile Locomotion via Model-free Learning
- Gabriel Margolis*, Ge Yang*, Kartik Paigwar, Tao Chen, Pulkit Agrawal
Comments